Main Navigation
Technologies
End Markets
News
Articles
Infocenter
Newsletters
Events
About Us
Suppliers
Advertise
Login
Subscribe
Search
Events
Newsletters
Advertise
Current Issue
Edición En Español
The official publication of
The official publication of
Close Menu
Login
|
Benefits of my account
|
Subscribe
|
Search
Login
Register
Forgot Password?
Reset Login Form
Register
Name
Contact
Employment
Password
Technologies
Additive Manufacturing
Bending
CNC Punching
Coil and Sheet Handling
Cutting
Finishing
In-Die Operations
Lubrication
Management
Materials
Other Processes
Pressroom Automation
Quality Control
Safety
Sensing/Electronics/IOT
Software
Stamping Presses
Tooling
Training
Welding and Joining
End Markets
Aerospace
Agriculture
Appliance
Automotive
Electronics
Hardware
Industrial
Job Shop
Marine
Medical
Military
Other
News
Articles
Current Issue
Archive
Featured Articles
Authors
Love Letters
5 Questions
Glossary
Metalforming Español
Stamping Journal
Infocenter
Tool & Die ebook
Podcasts
Videos
Webinars
White Papers
Newsletters
MetalForming
Business Edge
MetalForming Automotive
MetalForming Espanol
Events
Fabrication Strategy Summit
Hot Stamping Experience
Industry 4.0/ERP
Metal Stamping Technology
MetalForming LIVE
On the Shop Floor: Spring
Summer Series
On the Shop Floor: Fall
Mexico Stamping Technology
FABTECH
FABTECH Previews
Four on the Floor
Seen at FABTECH
About Us
Contact Us
Job Center
Sitemap
Subscribe
Terms and Conditions
Suppliers
Advertise
Print
Digital
Video
Social Media
Events
Editorial Guidelines
Home
❯
featured articles
Select Type of Technology
All Technology
Additive Manufacturing
Bending
CNC Punching
Coil and Sheet Handling
Cutting
Finishing
In-Die Operations
Lubrication
Management
Materials
Other Processes
Pressroom Automation
Quality Control
Safety
Sensing/Electronics/IOT
Software
Stamping Presses
Tooling
Training
Welding and Joining
Management
2025 Industry 4.0 Forum and ERP Shootout, July 16-17, Chicago, IL
Brad Kuvin
June 11, 2025
Management
ERP in Action
Brad Kuvin
June 10, 2025
Sensing/Electronics/IOT
Eliminating Pressroom Waste—One Walk at a Time
Manuel Resendes
June 10, 2025
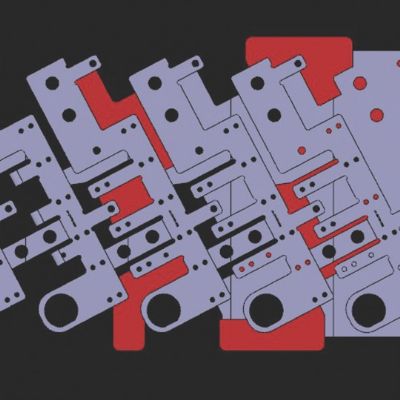
Software
Simulation Software Elevates Die-Development Efficiency
Brad Kuvin
June 10, 2025
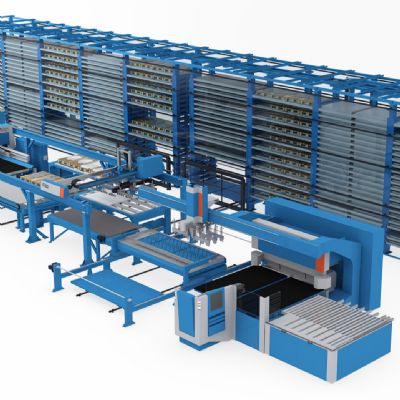
Cutting
The Power of Tightly Knit Laser Cutting Automation
Lou Kren
June 9, 2025
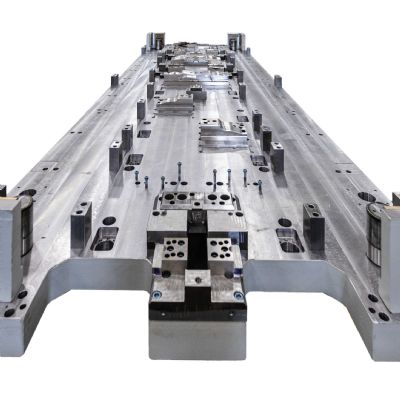
Tooling
Design for Manufacturing: a Win-Win in Metal Stamping
Kevin Conery
June 6, 2025
Cutting
Robotic Press Brake Relieves Bottleneck
Lou Kren
April 28, 2025
Bending
Creative Approaches to Common Press Brake Challenges, Part 4: At-the-Brake Fixes
Justin Talianek
April 25, 2025
Coil and Sheet Handling
Press Feed Strong
Kate Bachman
April 23, 2025
Coil and Sheet Handling
High-Quality, High-Speed Stamping
Lou Kren
April 22, 2025
Materials
Tooling Up for AHSS: Know the Material, Mind the S...
Lou Kren
April 1, 2025
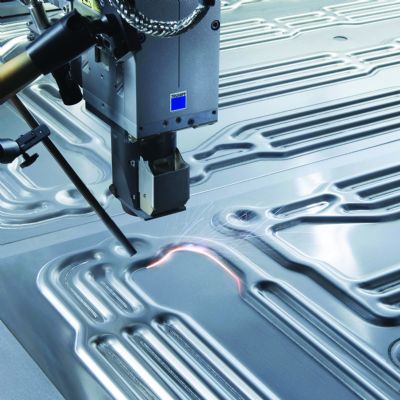
Welding and Joining
Laser Welding of EV Cooling Plates
Yama Fedai
March 31, 2025
Materials
Punching Through the Barriers: Processing Advanced...
March 29, 2025
Stamping Presses
Hydraulic Press Innovations Move into Mainstream
Jeffrey Walsh
March 27, 2025
Stamping Presses
Hydroforming Operation Picking Up Steam
Brad Kuvin
March 10, 2025
Pressroom Automation
Picking Press Controls for a New Press or Retrofit
Todd Wenzel
March 7, 2025
More
Subscribe to the Newsletter
Start receiving newsletters.