
Page 37 - MetalForming March 2019
P. 37
Welding Well
By Robert K. Cohen
Addressing Limiting Factors for Continuous Seam Welding—Part Two
Machine capability and control capability determine how fast a production seam welding process oper- ates. Speed increases until a limit is reached for four machine parameters: wheel velocity; current required for producing welds; cooling to keep electrodes and cur- rent-carrying conductors from getting too hot; and electrode force required to maintain material containment during the formation of each weld.
Selecting a control with a high-enough operating-current limit, such that current is not the limiting factor in deter- mining how fast welding can occur, ensures that the adaptive control runs the machine at maximum speed while main- taining weld-consistency standards.
This article digs deeper into what fabricators must know about machine parameters and controls for ensuring con- sistent continuous seam welds.
Velocity and Electrode-Force Variations
As the speed of a seam welder increases, variable loading of the part presented to the machine, motor-torque limita- tion, gear backlash, belt oscillation, less-than-optimum tun- ing of the motor-control-feedback parameters and machine mechanical resonances can cause significant instantaneous wheel-velocity fluctuations. Increasing the speed also reduces the time available to make each weld. As the weld time decreases, instantaneous velocity fluctuations increase weld variation. Velocity variations on a seam welder translate into variations in the size of the welds produced. Reducing velocity fluctuations from an existing machine could require impractical and costly engineering design changes.
Another challenge: As the speed of a seam welder increas- es, so does electrode-force variation, a source of weld vari- ation. As the seam wheels roll up onto the front of the part at high speeds, the wheels often overshoot and bounce onto the part. The momentary higher electrode force caused by the bounce can translate into an undersized weld, causing a leak. Depending on the resonant characteristics of the electrode-force system, the step of the wheels rolling up
Robert K. Cohen is president of Troy, NY-based Weld- Computer, a company that he founded in 1987 with a mission to solve manufacturers’ resistance-welding challenges and to ensure weld quality and consisten- cy. WeldComputer engineers, manufactures, sells and supports welding control and monitoring solutions for aerospace, defense, medical, electronics, automotive, appliance, industrial and general manufacturing. Robert K. Cohen, President/Founder
WeldComputer Corp. rcohen@weldcomputer.com
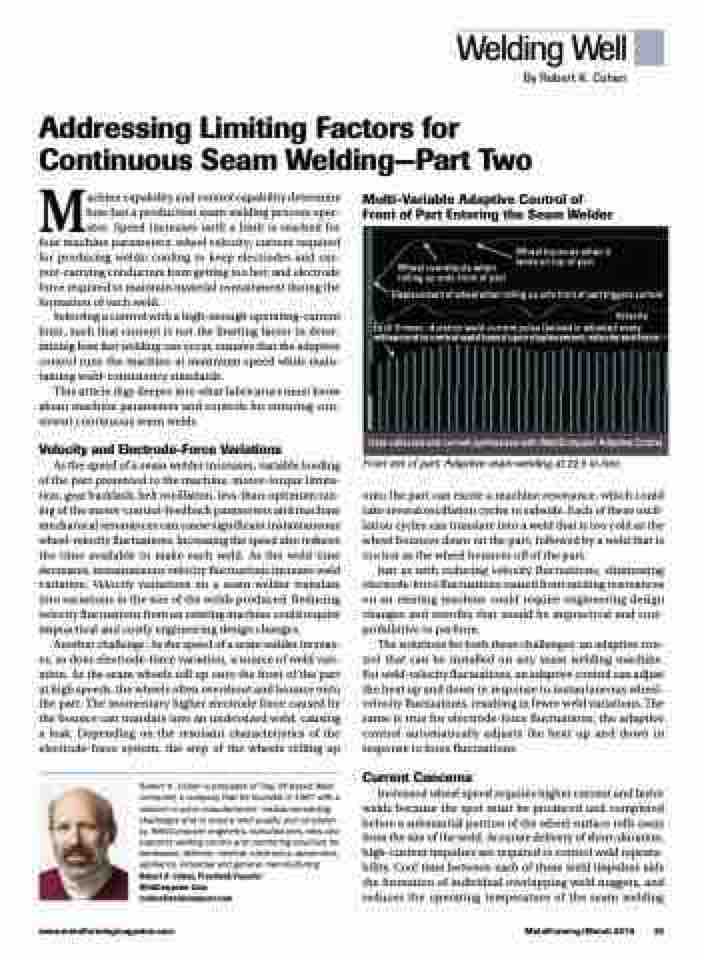
Multi-Variable Adaptive Control of Front of Part Entering the Seam Welder
Wheel overshoots when rolling up onto front of part
Wheel bounces when it lands on top of part
Displacement of wheel when rolling up onto front of part triggers current
Velocity
Each 5-msec.-duration weld-current pulse (below) is adjusted every millisecond to control weld based upon displacement, velocity and force
Data collected and current synthesized with WeldComputer Adaptive Control
Front ent of part: Adaptive seam welding at 22.5 in./sec.
onto the part can excite a machine resonance, which could take several oscillation cycles to subside. Each of these oscil- lation cycles can translate into a weld that is too cold as the wheel bounces down on the part, followed by a weld that is too hot as the wheel bounces off of the part.
Just as with reducing velocity fluctuations, eliminating electrode-force fluctuations caused from exciting resonances on an existing machine could require engineering design changes and retrofits that would be impractical and cost- prohibitive to perform.
The solutions for both these challenges: an adaptive con- trol that can be installed on any seam welding machine. For weld-velocity fluctuations, an adaptive control can adjust the heat up and down in response to instantaneous wheel- velocity fluctuations, resulting in fewer weld variations. The same is true for electrode-force fluctuations; the adaptive control automatically adjusts the heat up and down in response to force fluctuations.
Current Concerns
Increased wheel speed requires higher current and faster welds because the spot must be produced and completed before a substantial portion of the wheel surface rolls away from the site of the weld. Accurate delivery of short-duration, high-current impulses are required to control weld repeata- bility. Cool time between each of these weld impulses aids the formation of individual overlapping weld nuggets, and reduces the operating temperature of the seam welding
www.metalformingmagazine.com
MetalForming/March 2019 35
