
Page 74 - MetalForming October 2017
P. 74
Difficult Welds?
Seam-Tracking Success Stories Abound
Auger manufacturing represents an ideal example of a welding robot’s seam-tracking capability. An auger is challenging because it is built up of complex curves in two planes. Often, materials are quite thick, difficult to bend accurately from batch to batch, and usually are tacked in position with minimal tooling. All of this stacks tol- erances, making automatic welding at one time nearly impossible. In this application, the user employs a sym- metrical zigzag weave with centerline tracking, causing the robot to simply stay in the middle of the joint.
Seam tracking requires program- ming of a few strategic points at the start and end of the weld, with a tactile sensor used to determine the start point specific to that auger. When the arc is established, the robot and a workpiece positioner that rotates the auger can operate in synchronous motion. The tracking and weave pat-
DAS SYSTEM
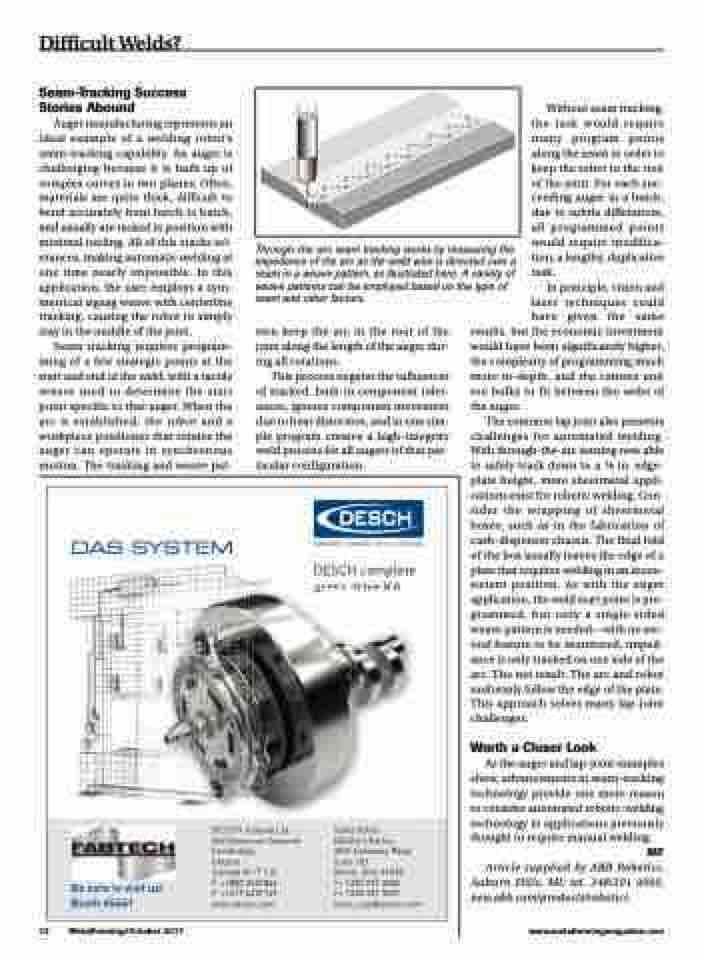
Through-the-arc seam tracking works by measuring the impedance of the arc as the weld wire is directed over a seam in a weave pattern, as illustrated here. A variety of weave patterns can be employed based on the type of seam and other factors.
tern keep the arc in the root of the joint along the length of the auger dur- ing all rotations.
This process negates the influences of stacked, built-in component toler- ances, ignores component movement due to heat distortion, and in one sim- ple program creates a high-integrity weld process for all augers of that par- ticular configuration.
Without seam tracking, the task would require many program points along the seam in order to keep the robot in the root of the joint. For each suc- ceeding auger in a batch, due to subtle differences, all programmed points would require modifica- tion, a lengthy, duplicative task.
In principle, vision and laser techniques could have given the same the economic investment
Be sure to visit us! Booth A5441
DESCH Canada Ltd. 240 Shearson Crescent Cambridge,
Ontario
Canada N 1T 1J6
T +1800 2631866
F +1519 6231169 www.desch.com
Sales Office
DESCH USA Inc.
3501 Embassy Pkwy Suite 101
Akron, Ohio 44333
T+ 1330 937 9030
F+ 1330 937 9031 sales_usa@desch.com
72 MetalForming/October 2017
www.metalformingmagazine.com
DESCH complete
The common lap joint also presents challenges for automated welding. With through-the-arc sensing now able to safely track down to a 1⁄8 in. edge- plate height, more sheetmetal appli- cations exist for robotic welding. Con- sider the wrapping of sheetmetal boxes, such as in the fabrication of cash-dispenser chassis. The final fold of the box usually leaves the edge of a plate that requires welding in an incon- sistent position. As with the auger application, the weld start point is pro- grammed, but only a single-sided weave pattern is needed—with no sec- ond feature to be monitored, imped- ance is only tracked on one side of the arc. The net result: The arc and robot uniformly follow the edge of the plate. This approach solves many lap-joint challenges.
Worth a Closer Look
As the auger and lap-joint examples show, advancements in seam-tracking technology provide one more reason to consider automated robotic-welding technology in applications previously thought to require manual welding.
MF
Article supplied by ABB Robotics, Auburn Hills, MI; tel. 248/391 9000, new.abb.com/products/robotics.
press d
drive KA
results, but
would have been significantly higher, the complexity of programming much more in-depth, and the camera unit too bulky to fit between the webs of the auger.
