Main Navigation
Technologies
End Markets
News
Articles
Infocenter
Newsletters
Events
About Us
Suppliers
Advertise
Login
Subscribe
Search
Events
Newsletters
Advertise
Current Issue
Edición En Español
The official publication of
The official publication of
Close Menu
Login
|
Benefits of my account
|
Subscribe
|
Search
Login
Register
Forgot Password?
Reset Login Form
Register
Name
Contact
Employment
Password
Technologies
Additive Manufacturing
Bending
CNC Punching
Coil and Sheet Handling
Cutting
Finishing
In-Die Operations
Lubrication
Management
Materials
Other Processes
Pressroom Automation
Quality Control
Safety
Sensing/Electronics/IOT
Software
Stamping Presses
Tooling
Training
Welding and Joining
End Markets
Aerospace
Agriculture
Appliance
Automotive
Electronics
Hardware
Industrial
Job Shop
Marine
Medical
Military
Other
News
Articles
Current Issue
Archive
Featured Articles
Authors
5 Questions
Glossary
Metalforming Español
Stamping Journal
Infocenter
Podcasts
Videos
Webinars
White Papers
Newsletters
MetalForming
Business Edge
MetalForming Automotive
FPN Monthly
MetalForming Espanol
Events
Hot Stamping Experience
Industry 4.0/ERP
Metal Stamping Technology
MetalForming LIVE
Mexico MetalForming Technology
FABTECH
FABTECH Previews
Four on the Floor
Seen at FABTECH
About Us
Contact Us
Job Center
Sitemap
Subscribe
Terms and Conditions
Suppliers
Advertise
Print
Digital
Video
Social Media
Events
Editorial Guidelines
Home
❯
technology
Select Type of Technology
All Technology
Additive Manufacturing
Bending
CNC Punching
Coil and Sheet Handling
Cutting
Finishing
In-Die Operations
Lubrication
Management
Materials
Other Processes
Pressroom Automation
Quality Control
Safety
Sensing/Electronics/IOT
Software
Stamping Presses
Tooling
Training
Welding and Joining
Select Type of Content
All Content
Articles (9772)
News (3590)
Commentary (900)
Products (3620)
Videos (143)
Podcasts (79)
White Papers (38)
Events (8)
Webinars (75)
Management
Tennessee Volkswagen Plant Votes to Unionize
April 23, 2024
Stamping Presses
Seyi Partners with Dallas Industries on New Showroom Addition
April 22, 2024
Stamping Presses
Aida-America Launches Spanish Language Website
April 22, 2024
CNC Punching
Wilson Tool Appoints Semerad Chief Commercial Officer
April 19, 2024
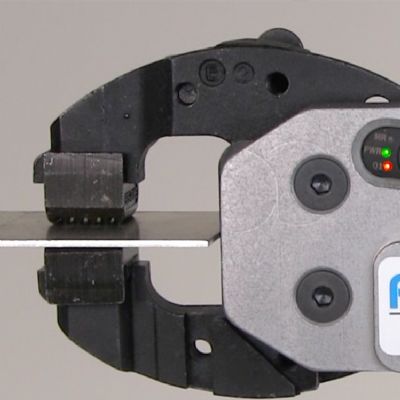
Pressroom Automation
Option Allows Clamp to Sense Presence of Sheet Met...
April 19, 2024
Pressroom Automation
Exair Launches Interactive Digital Catalog of Compresse...
April 19, 2024
Stamping Presses
Mexico Stamping Technology Webinar Series 2024: Day 4
April 18, 2024
WEBINAR
Stamping Presses
Nidec Press & Automaton Expanding Mexico Facility
April 18, 2024
Cutting
AI in Manufacturing Makes Impressions at INTECH
April 17, 2024
Stamping Presses
AP&T Collaborating with ArcelorMittal for Press Hardening Applications
April 17, 2024
Stamping Presses
Mexico Stamping Technology Webinar Series 2024: Da...
April 16, 2024
WEBINAR
Materials
Steel Warehouse Rebrands its Cold Mill Division, Invests in New Capital
April 16, 2024
Pressroom Automation
Producing the New Aluminum-Intensive Porsche Tayca...
April 15, 2024
VIDEO
Management
Copper Development Association Promotes Adam Estelle to...
April 15, 2024
Management
Quickparts Earns ISO 27001:2022 Certification, Highlighting Commitment to Information...
April 15, 2024
Management
MetalForming Minute: April 2024
April 12, 2024
VIDEO
More
Subscribe to the Newsletter
Start receiving newsletters.








 WEBINAR
WEBINAR

 VIDEO
VIDEO
